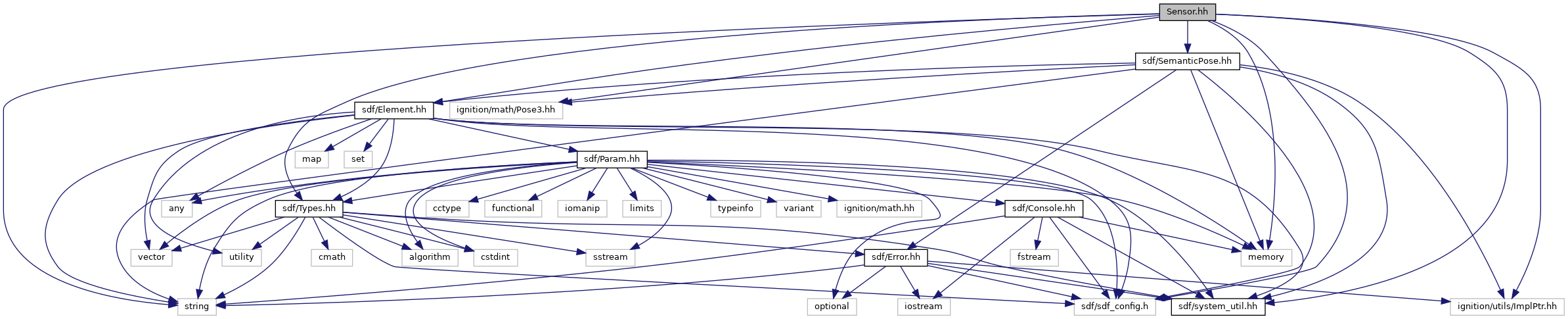
#include <memory>
#include <string>
#include <ignition/math/Pose3.hh>
#include <ignition/utils/ImplPtr.hh>
#include "sdf/Element.hh"
#include "sdf/SemanticPose.hh"
#include "sdf/Types.hh"
#include "sdf/sdf_config.h"
#include "sdf/system_util.hh"
Go to the source code of this file.
|
| | sdf |
| | namespace for Simulation Description Format parser
|
| |
| | sdf::v11 |
| |
|
| enum | sdf::v11::SensorType {
sdf::v11::SensorType::NONE = 0,
sdf::v11::SensorType::ALTIMETER = 1,
sdf::v11::SensorType::CAMERA = 2,
sdf::v11::SensorType::CONTACT = 3,
sdf::v11::SensorType::DEPTH_CAMERA = 4,
sdf::v11::SensorType::FORCE_TORQUE = 5,
sdf::v11::SensorType::GPS = 6,
sdf::v11::SensorType::GPU_LIDAR = 7,
sdf::v11::SensorType::IMU = 8,
sdf::v11::SensorType::LOGICAL_CAMERA = 9,
sdf::v11::SensorType::MAGNETOMETER = 10,
sdf::v11::SensorType::MULTICAMERA = 11,
sdf::v11::SensorType::LIDAR = 12,
sdf::v11::SensorType::RFID = 13,
sdf::v11::SensorType::RFIDTAG = 14,
sdf::v11::SensorType::SONAR = 15,
sdf::v11::SensorType::WIRELESS_RECEIVER = 16,
sdf::v11::SensorType::WIRELESS_TRANSMITTER = 17,
sdf::v11::SensorType::AIR_PRESSURE = 18,
sdf::v11::SensorType::RGBD_CAMERA = 19,
sdf::v11::SensorType::THERMAL_CAMERA = 20
} |
| |