
#include <string>#include <list>#include <deque>#include <utility>#include <map>#include <boost/shared_ptr.hpp>#include "msgs/msgs.hh"#include "transport/Connection.hh"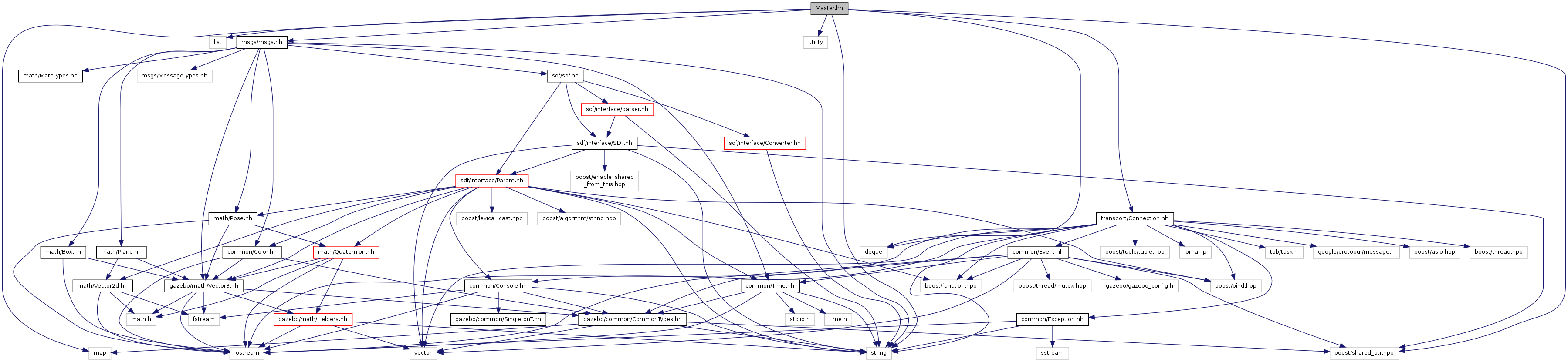
Go to the source code of this file.
Classes | |
| class | gazebo::Master |
| A ROS Master-like manager that directs gztopic connections, enables each gazebo network client to locate one another for peer-to-peer communication. More... | |
Namespaces | |
| namespace | gazebo |
| Forward declarations for the common classes. | |