
#include <urdf_model/model.h>#include <urdf_model/link.h>#include <tinyxml.h>#include <cstdio>#include <cstdlib>#include <cmath>#include <vector>#include <string>#include <sstream>#include <map>#include "ode/mass.h"#include "ode/rotation.h"#include "gazebo/math/Pose.hh"#include "gazebo/common/Console.hh"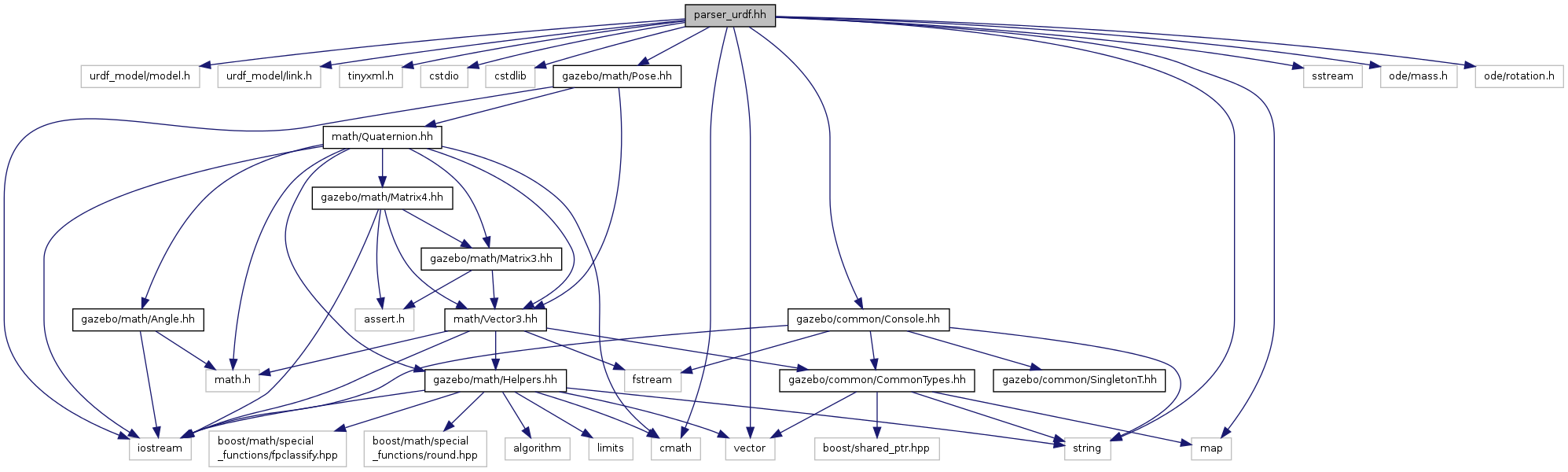
Go to the source code of this file.
Classes | |
| class | urdf2gazebo::GazeboExtension |
| class | urdf2gazebo::URDF2Gazebo |
Namespaces | |
| namespace | urdf2gazebo |
| namespace for URDF to SDF parser | |
Typedefs | |
| typedef const urdf::Link * | urdf2gazebo::ConstUrdfLinkPtr |
| typedef urdf::Collision * | urdf2gazebo::UrdfCollisionPtr |
| typedef urdf::Link * | urdf2gazebo::UrdfLinkPtr |
| typedef urdf::Visual * | urdf2gazebo::UrdfVisualPtr |