|
| | GpuLaser (const std::string &_namePrefix, Scene *_scene, bool _autoRender=true) |
| | Constructor.
|
| |
| virtual | ~GpuLaser () |
| | Destructor.
|
| |
| template<typename T > |
| event::ConnectionPtr | ConnectNewLaserFrame (T _subscriber) |
| | Connect to a laser frame signal.
|
| |
| void | CreateLaserTexture (const std::string &_textureName) |
| | Create the texture which is used to render laser data.
|
| |
| void | DisconnectNewLaserFrame (event::ConnectionPtr &_c) |
| | Disconnect from a laser frame signal.
|
| |
| virtual void | Fini () |
| | Finalize the camera.
|
| |
| const float * | GetLaserData () |
| | All things needed to get back z buffer for laser data.
|
| |
| virtual void | Init () |
| | Initialize the camera.
|
| |
| virtual void | Load (sdf::ElementPtr &_sdf) |
| |
| virtual void | Load () |
| | Load the camera with default parmeters.
|
| |
| virtual void | notifyRenderSingleObject (Ogre::Renderable *_rend, const Ogre::Pass *_p, const Ogre::AutoParamDataSource *_s, const Ogre::LightList *_ll, bool _supp) |
| |
| virtual void | PostRender () |
| | Post render.
|
| |
| void | SetParentSensor (sensors::GpuRaySensor *_parent) |
| | Set the parent sensor.
|
| |
| void | SetRangeCount (unsigned int _w, unsigned int _h=1) |
| | Set the number of laser samples in the width and height.
|
| |
| | Camera (const std::string &_namePrefix, Scene *_scene, bool _autoRender=true) |
| | Constructor.
|
| |
| virtual | ~Camera () |
| | Destructor.
|
| |
| void | AttachToVisual (const std::string &_visualName, bool _inheritOrientation, double _minDist=0.0, double _maxDist=0.0) |
| | Attach the camera to a scene node.
|
| |
| template<typename T > |
| event::ConnectionPtr | ConnectNewImageFrame (T _subscriber) |
| | Connect a to the new image signal.
|
| |
| void | CreateRenderTexture (const std::string &_textureName) |
| | Set the render target.
|
| |
| void | DisconnectNewImageFrame (event::ConnectionPtr &_c) |
| | Disconnect from an image frame.
|
| |
| void | EnableSaveFrame (bool _enable) |
| | Enable or disable saving.
|
| |
| float | GetAspectRatio () const |
| | Get the apect ratio.
|
| |
| virtual float | GetAvgFPS () |
| | Get the average FPS.
|
| |
| void | GetCameraToViewportRay (int _screenx, int _screeny, math::Vector3 &_origin, math::Vector3 &_dir) |
| | Get a world space ray as cast from the camera through the viewport.
|
| |
| math::Vector3 | GetDirection () const |
| | Get the camera's direction vector.
|
| |
| double | GetFarClip () |
| | Get the far clip distance.
|
| |
| math::Angle | GetHFOV () const |
| | Get the camera FOV (horizontal)
|
| |
| size_t | GetImageByteSize () const |
| | Get the image size in bytes.
|
| |
| virtual const unsigned char * | GetImageData (unsigned int i=0) |
| | Get a pointer to the image data.
|
| |
| unsigned int | GetImageDepth () const |
| | Get the depth of the image.
|
| |
| std::string | GetImageFormat () const |
| | Get the height of the image.
|
| |
| unsigned int | GetImageHeight () const |
| | Get the height of the image.
|
| |
| unsigned int | GetImageWidth () const |
| | Get the width of the image.
|
| |
| bool | GetInitialized () const |
| | Returns true if initialized.
|
| |
| common::Time | GetLastRenderWallTime () |
| | Get the last time the camera was rendered.
|
| |
| std::string | GetName () const |
| | Get the camera's name.
|
| |
| double | GetNearClip () |
| | Get the near clip distance.
|
| |
| Ogre::Camera * | GetOgreCamera () const |
| | Get a pointer to the ogre camera.
|
| |
| double | GetRenderRate () const |
| | Get the render Hz rate.
|
| |
| Ogre::Texture * | GetRenderTexture () const |
| | Get the render texture.
|
| |
| math::Vector3 | GetRight () |
| | Get the viewport right vector.
|
| |
| Scene * | GetScene () const |
| | Get the scene this camera is in.
|
| |
| Ogre::SceneNode * | GetSceneNode () const |
| | Get the camera's scene node.
|
| |
| unsigned int | GetTextureHeight () const |
| | Get the height of the off-screen render texture.
|
| |
| unsigned int | GetTextureWidth () const |
| | Get the width of the off-screen render texture.
|
| |
| virtual unsigned int | GetTriangleCount () |
| | Get the triangle count.
|
| |
| math::Vector3 | GetUp () |
| | Get the viewport up vector.
|
| |
| math::Angle | GetVFOV () const |
| | Get the camera FOV (vertical)
|
| |
| Ogre::Viewport * | GetViewport () const |
| | Get a pointer to the Ogre::Viewport.
|
| |
| unsigned int | GetViewportHeight () const |
| | Get the viewport height in pixels.
|
| |
| unsigned int | GetViewportWidth () const |
| | Get the viewport width in pixels.
|
| |
| unsigned int | GetWindowId () const |
| | Get the ID of the window this camera is rendering into.
|
| |
| bool | GetWorldPointOnPlane (int _x, int _y, const math::Plane &_plane, math::Vector3 &_result) |
| | Get point on a plane.
|
| |
| math::Pose | GetWorldPose () |
| | Get the global pose of the camera.
|
| |
| math::Vector3 | GetWorldPosition () const |
| | Get the camera position in the world.
|
| |
| math::Quaternion | GetWorldRotation () const |
| | Get the camera's orientation in the world.
|
| |
| double | GetZValue (int _x, int _y) |
| | Get the Z-buffer value at the given image coordinate.
|
| |
| bool | IsInitialized () const |
| | Return true if the camera has been initialized.
|
| |
| bool | IsVisible (VisualPtr _visual) |
| | Return true if the visual is within the camera's view frustum.
|
| |
| bool | IsVisible (const std::string &_visualName) |
| | Return true if the visual is within the camera's view frustum.
|
| |
| virtual void | Load (sdf::ElementPtr _sdf) |
| | Load the camera with a set of parmeters.
|
| |
| virtual bool | MoveToPosition (const math::Pose &_pose, double _time) |
| | Move the camera to a position (this is an animated motion).
|
| |
| bool | MoveToPositions (const std::vector< math::Pose > &_pts, double _time, boost::function< void()> _onComplete=NULL) |
| | Move the camera to a series of poses (this is an animated motion).
|
| |
| void | Render () |
| | Render the camera.
|
| |
| void | RotatePitch (math::Angle _angle) |
| | Rotate the camera around the pitch axis.
|
| |
| void | RotateYaw (math::Angle _angle) |
| | Rotate the camera around the yaw axis.
|
| |
| bool | SaveFrame (const std::string &_filename) |
| | Save the last frame to disk.
|
| |
| void | SetAspectRatio (float _ratio) |
| | Set the aspect ratio.
|
| |
| void | SetCaptureData (bool _value) |
| | Set whether to capture data.
|
| |
| void | SetClipDist (float _near, float _far) |
| | Set the clip distances.
|
| |
| void | SetHFOV (math::Angle _angle) |
| | Set the camera FOV (horizontal)
|
| |
| void | SetImageHeight (unsigned int _h) |
| | Set the image height.
|
| |
| void | SetImageSize (unsigned int _w, unsigned int _h) |
| | Set the image size.
|
| |
| void | SetImageWidth (unsigned int _w) |
| | Set the image height.
|
| |
| void | SetName (const std::string &_name) |
| | Set the camera's name.
|
| |
| void | SetRenderRate (double _hz) |
| | Set the render Hz rate.
|
| |
| virtual void | SetRenderTarget (Ogre::RenderTarget *_target) |
| | Set the camera's render target.
|
| |
| void | SetSaveFramePathname (const std::string &_pathname) |
| | Set the save frame pathname.
|
| |
| void | SetScene (Scene *_scene) |
| | Set the scene this camera is viewing.
|
| |
| void | SetSceneNode (Ogre::SceneNode *_node) |
| | Set the camera's scene node.
|
| |
| void | SetWindowId (unsigned int _windowId) |
| |
| virtual void | SetWorldPose (const math::Pose &_pose) |
| | Set the global pose of the camera.
|
| |
| void | SetWorldPosition (const math::Vector3 &_pos) |
| | Set the world position.
|
| |
| void | SetWorldRotation (const math::Quaternion &_quat) |
| | Set the world orientation.
|
| |
| void | ShowWireframe (bool _s) |
| | Set whether to view the world in wireframe.
|
| |
| void | ToggleShowWireframe () |
| | Toggle whether to view the world in wireframe.
|
| |
| void | TrackVisual (const std::string &_visualName) |
| | Set the camera to track a scene node.
|
| |
| void | Translate (const math::Vector3 &_direction) |
| | Translate the camera.
|
| |
| virtual void | Update () |
| |
GPU based laser distance sensor.

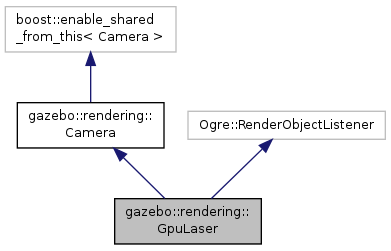
 Public Member Functions inherited from gazebo::rendering::Camera
Public Member Functions inherited from gazebo::rendering::Camera