
#include <vector>#include <list>#include <deque>#include <string>#include <boost/enable_shared_from_this.hpp>#include <boost/shared_ptr.hpp>#include "gazebo/transport/TransportTypes.hh"#include "gazebo/msgs/msgs.hh"#include "gazebo/common/CommonTypes.hh"#include "gazebo/common/Event.hh"#include "gazebo/physics/Base.hh"#include "gazebo/physics/PhysicsTypes.hh"#include "gazebo/physics/WorldState.hh"#include "gazebo/sdf/sdf.hh"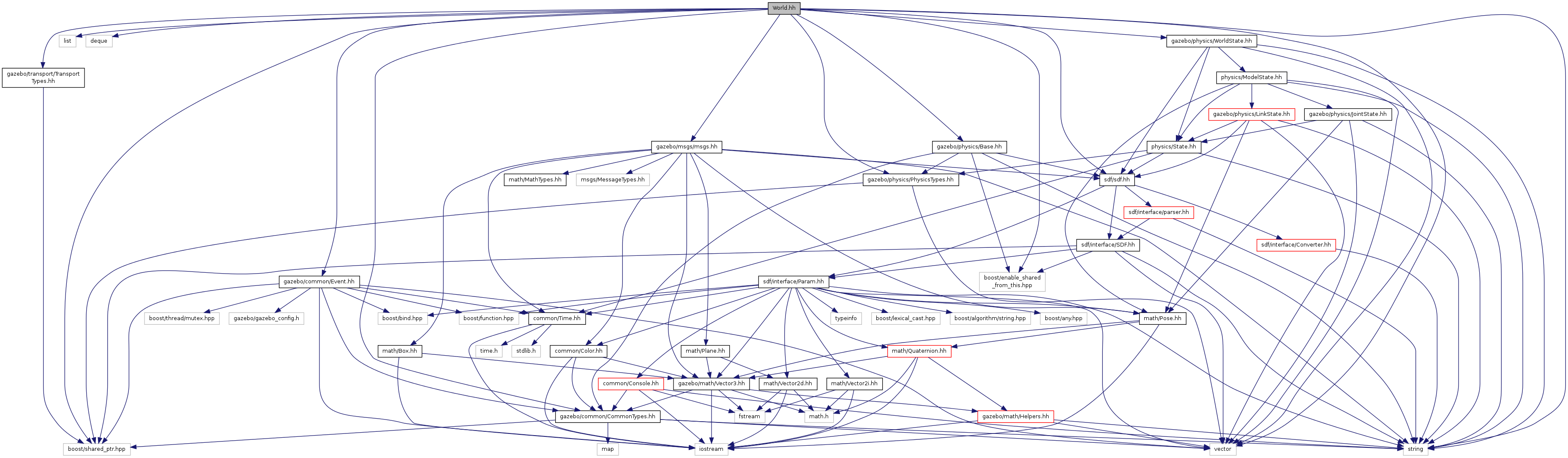
Go to the source code of this file.
Classes | |
| class | gazebo::physics::World |
| The world provides access to all other object within a simulated environment. More... | |
Namespaces | |
| namespace | boost |
| namespace | gazebo |
| Forward declarations for the common classes. | |
| namespace | gazebo::physics |
| namespace for physics | |