
#include <JointControllerPrivate.hh>
Public Attributes | |
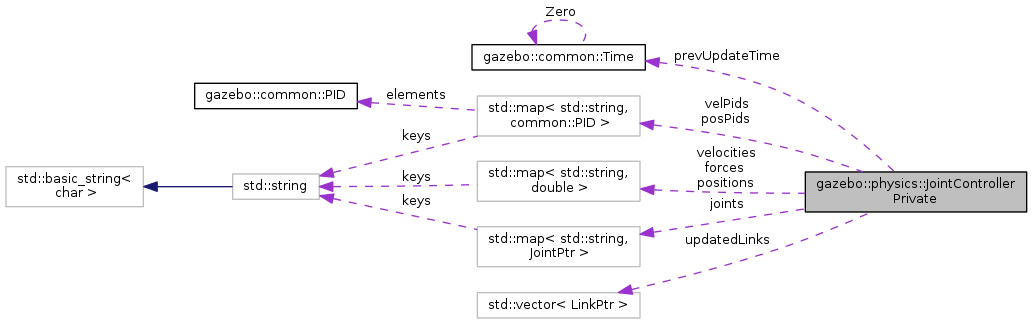
| std::map< std::string, double > | forces |
| Forces applied to joints. More... | |
| transport::SubscriberPtr | jointCmdSub |
| Subscribe to joint command. More... | |
| std::map< std::string, JointPtr > | joints |
| Map of joint names to the joint pointer. More... | |
| ModelPtr | model |
| Model to control. More... | |
| transport::NodePtr | node |
| Node for communication. More... | |
| std::map< std::string, double > | positions |
| Joint positions. More... | |
| std::map< std::string, common::PID > | posPids |
| Position PID controllers. More... | |
| common::Time | prevUpdateTime |
| Last time the controller was updated. More... | |
| Link_V | updatedLinks |
| List of links that have been updated. More... | |
| std::map< std::string, double > | velocities |
| Joint velocities. More... | |
| std::map< std::string, common::PID > | velPids |
| Velocity PID controllers. More... | |
| std::map<std::string, double> gazebo::physics::JointControllerPrivate::forces |
Forces applied to joints.
| transport::SubscriberPtr gazebo::physics::JointControllerPrivate::jointCmdSub |
Subscribe to joint command.
| std::map<std::string, JointPtr> gazebo::physics::JointControllerPrivate::joints |
Map of joint names to the joint pointer.
| transport::NodePtr gazebo::physics::JointControllerPrivate::node |
Node for communication.
| std::map<std::string, double> gazebo::physics::JointControllerPrivate::positions |
Joint positions.
| std::map<std::string, common::PID> gazebo::physics::JointControllerPrivate::posPids |
Position PID controllers.
| common::Time gazebo::physics::JointControllerPrivate::prevUpdateTime |
Last time the controller was updated.
| Link_V gazebo::physics::JointControllerPrivate::updatedLinks |
List of links that have been updated.
| std::map<std::string, double> gazebo::physics::JointControllerPrivate::velocities |
Joint velocities.
| std::map<std::string, common::PID> gazebo::physics::JointControllerPrivate::velPids |
Velocity PID controllers.