
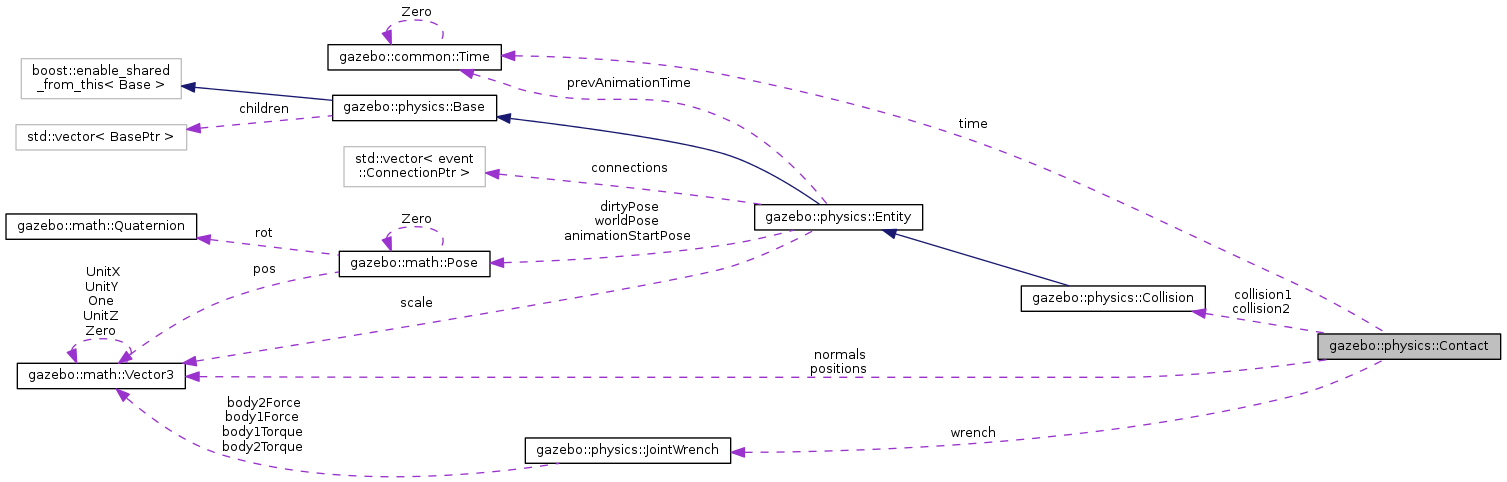
A contact between two collisions. More...
#include <physics/physics.hh>
Public Member Functions | |
| Contact () | |
| Constructor. More... | |
| Contact (const Contact &_contact) | |
| Copy constructor. More... | |
| virtual | ~Contact () |
| Destructor. More... | |
| std::string | DebugString () const |
| Produce a debug string. More... | |
| void | FillMsg (msgs::Contact &_msg) const |
| Populate a msgs::Contact with data from this. More... | |
| Contact & | operator= (const Contact &_contact) |
| Operator =. More... | |
| Contact & | operator= (const msgs::Contact &_contact) |
| Operator =. More... | |
| void | Reset () |
| Reset to default values. More... | |
Public Attributes | |
| Collision * | collision1 |
| Pointer to the first collision object. More... | |
| Collision * | collision2 |
| Pointer to the second collision object. More... | |
| int | count |
| Length of all the arrays. More... | |
| double | depths [32] |
| Array of contact depths. More... | |
| math::Vector3 | normals [32] |
| Array of force normals. More... | |
| math::Vector3 | positions [32] |
| Array of force positions. More... | |
| common::Time | time |
| Time at which the contact occurred. More... | |
| WorldPtr | world |
| World in which the contact occurred. More... | |
| JointWrench | wrench [32] |
| Array of forces for the contact. More... | |
A contact between two collisions.
Each contact can consist of a number of contact points
| gazebo::physics::Contact::Contact | ( | ) |
Constructor.
| gazebo::physics::Contact::Contact | ( | const Contact & | _contact | ) |
Copy constructor.
| [in] | _contact | Contact to copy. |
|
virtual |
Destructor.
| std::string gazebo::physics::Contact::DebugString | ( | ) | const |
Produce a debug string.
| void gazebo::physics::Contact::FillMsg | ( | msgs::Contact & | _msg | ) | const |
Populate a msgs::Contact with data from this.
| [out] | _msg | Contact message the will hold the data. |
| Contact& gazebo::physics::Contact::operator= | ( | const msgs::Contact & | _contact | ) |
Operator =.
| [in] | _contact | msgs::Contact to copy. |
| void gazebo::physics::Contact::Reset | ( | ) |
Reset to default values.
| Collision* gazebo::physics::Contact::collision1 |
Pointer to the first collision object.
| Collision* gazebo::physics::Contact::collision2 |
Pointer to the second collision object.
| int gazebo::physics::Contact::count |
Length of all the arrays.
| double gazebo::physics::Contact::depths[32] |
Array of contact depths.
| math::Vector3 gazebo::physics::Contact::normals[32] |
Array of force normals.
| math::Vector3 gazebo::physics::Contact::positions[32] |
Array of force positions.
| common::Time gazebo::physics::Contact::time |
Time at which the contact occurred.
| JointWrench gazebo::physics::Contact::wrench[32] |
Array of forces for the contact.
All forces and torques are relative to the center of mass of the respective links that the collision elments are attached to.