
#include <memory>#include <string>#include <ignition/math/Pose3.hh>#include <ignition/utils/ImplPtr.hh>#include "sdf/Element.hh"#include "sdf/SemanticPose.hh"#include "sdf/Types.hh"#include "sdf/sdf_config.h"#include "sdf/system_util.hh"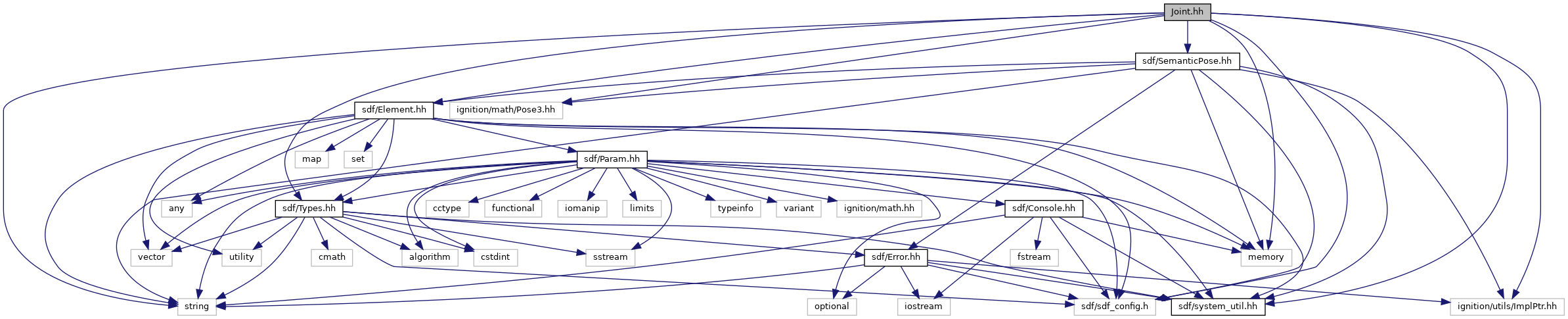
Go to the source code of this file.
Classes | |
| class | sdf::v11::Joint |
| class | sdf::v11::ScopedGraph< T > |
Namespaces | |
| sdf | |
| namespace for Simulation Description Format parser | |
| sdf::v11 | |
Enumerations | |
| enum | sdf::v11::JointType { sdf::v11::JointType::INVALID = 0, sdf::v11::JointType::BALL = 1, sdf::v11::JointType::CONTINUOUS = 2, sdf::v11::JointType::FIXED = 3, sdf::v11::JointType::GEARBOX = 4, sdf::v11::JointType::PRISMATIC = 5, sdf::v11::JointType::REVOLUTE = 6, sdf::v11::JointType::REVOLUTE2 = 7, sdf::v11::JointType::SCREW = 8, sdf::v11::JointType::UNIVERSAL = 9 } |
| The set of joint types. More... | |