
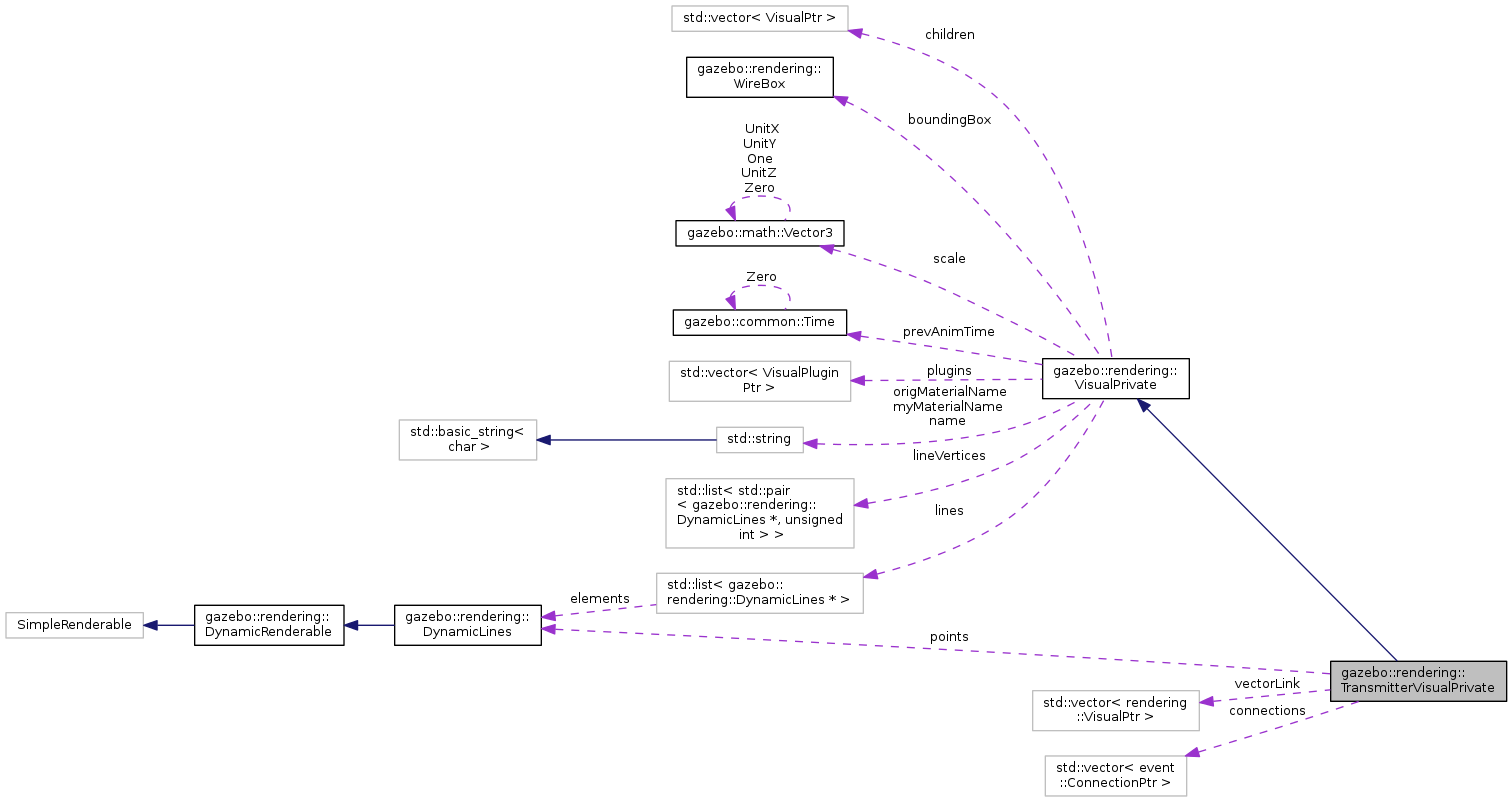
Private data for the Transmitter Visual class. More...
#include <TransmitterVisualPrivate.hh>
Public Attributes | |
| std::vector< event::ConnectionPtr > | connections |
| All the event connections. More... | |
| boost::shared_ptr < msgs::PropagationGrid const > | gridMsg |
| The current contact message. More... | |
| bool | isFirst |
| Use for allocate the visuals for the grid only the first time you receive the grid. More... | |
| boost::mutex | mutex |
| Mutex to protect the contact message. More... | |
| transport::NodePtr | node |
| Pointer to a node that handles communication. More... | |
| DynamicLines * | points |
| Renders the points representing the signal strength. More... | |
| bool | receivedMsg |
| True if we have received a message. More... | |
| transport::SubscriberPtr | signalPropagationSub |
| Subscription to the propagation data. More... | |
| std::vector< rendering::VisualPtr > | vectorLink |
| Store the list of visuals. More... | |
 Public Attributes inherited from gazebo::rendering::VisualPrivate Public Attributes inherited from gazebo::rendering::VisualPrivate | |
| Ogre::AnimationState * | animState |
| Used to animate the visual. More... | |
| WireBox * | boundingBox |
| A wire frame bounding box. More... | |
| std::vector< VisualPtr > | children |
| Children visuals. More... | |
| uint32_t | id |
| Unique id of this visual. More... | |
| bool | initialized |
| True if initialized. More... | |
| bool | isStatic |
| True if the visual is static, which allows Ogre to improve performance. More... | |
| bool | lighting |
| True if lighting will be applied to this visual. More... | |
| std::list< DynamicLines * > | lines |
| List of all the lines created. More... | |
| std::list< std::pair < DynamicLines *, unsigned int > > | lineVertices |
| Lines and their vertices connected to this visual. More... | |
| std::string | myMaterialName |
| The unique name for the visual's material. More... | |
| std::string | name |
| Name of the visual. More... | |
| boost::function< void()> | onAnimationComplete |
| Callback for the animation complete event. More... | |
| std::string | origMaterialName |
| The original name for the visual's material. More... | |
| VisualPtr | parent |
| Parent visual. More... | |
| std::vector< VisualPluginPtr > | plugins |
| A list of visual plugins. More... | |
| event::ConnectionPtr | preRenderConnection |
| Connection for the pre render event. More... | |
| common::Time | prevAnimTime |
| Time of the previous animation step. More... | |
| Ogre::RibbonTrail * | ribbonTrail |
| The ribbon train created by the visual. More... | |
| math::Vector3 | scale |
| Scale of visual. More... | |
| ScenePtr | scene |
| Pointer to the visual's scene. More... | |
| Ogre::SceneNode * | sceneNode |
| Pointer to the visual's scene node in Ogre. More... | |
| sdf::ElementPtr | sdf |
| The SDF element for the visual. More... | |
| Ogre::SkeletonInstance * | skeleton |
| The visual's skeleton, used only for person simulation. More... | |
| Ogre::StaticGeometry * | staticGeom |
| Pointer to the static geometry. More... | |
| float | transparency |
| Transparency value. More... | |
| bool | useRTShader |
| True to use RT shader system. More... | |
| bool | visible |
| True if rendered. More... | |
Additional Inherited Members | |
| Static Public Attributes inherited from gazebo::rendering::VisualPrivate | |
| static uint32_t | visualIdCount |
| Counter used to create unique ids. More... | |
Private data for the Transmitter Visual class.
| std::vector<event::ConnectionPtr> gazebo::rendering::TransmitterVisualPrivate::connections |
All the event connections.
| boost::shared_ptr<msgs::PropagationGrid const> gazebo::rendering::TransmitterVisualPrivate::gridMsg |
The current contact message.
| bool gazebo::rendering::TransmitterVisualPrivate::isFirst |
Use for allocate the visuals for the grid only the first time you receive the grid.
The next times there are just updates.
| boost::mutex gazebo::rendering::TransmitterVisualPrivate::mutex |
Mutex to protect the contact message.
| transport::NodePtr gazebo::rendering::TransmitterVisualPrivate::node |
Pointer to a node that handles communication.
| DynamicLines* gazebo::rendering::TransmitterVisualPrivate::points |
Renders the points representing the signal strength.
| bool gazebo::rendering::TransmitterVisualPrivate::receivedMsg |
True if we have received a message.
| transport::SubscriberPtr gazebo::rendering::TransmitterVisualPrivate::signalPropagationSub |
Subscription to the propagation data.
| std::vector<rendering::VisualPtr> gazebo::rendering::TransmitterVisualPrivate::vectorLink |
Store the list of visuals.