Gaussian noise class. More...
#include <GaussianNoiseModel.hh>
Public Member Functions | |
| GaussianNoiseModel () | |
| Constructor. More... | |
| virtual | ~GaussianNoiseModel () |
| Destructor. More... | |
| double | ApplyImpl (double _in) |
| Apply noise to input data value. More... | |
| virtual void | Fini () |
| Finalize the noise model. More... | |
| double | GetBias () const |
| Accessor for bias. More... | |
| double | GetMean () const |
| Accessor for mean. More... | |
| double | GetStdDev () const |
| Accessor for stddev. More... | |
| virtual void | Load (sdf::ElementPtr _sdf) |
| Load noise parameters from sdf. More... | |
| virtual void | Print (std::ostream &_out) const |
| Documentation inherited. More... | |
 Public Member Functions inherited from gazebo::sensors::Noise Public Member Functions inherited from gazebo::sensors::Noise | |
| Noise (NoiseType _type) | |
| Constructor. More... | |
| virtual | ~Noise () |
| Destructor. More... | |
| double | Apply (double _in) |
| Apply noise to input data value. More... | |
| NoiseType | GetNoiseType () const |
| Accessor for NoiseType. More... | |
| virtual void | SetCamera (rendering::CameraPtr _camera) |
| Set camera needed to create image noise. More... | |
| virtual void | SetCustomNoiseCallback (boost::function< double(double)> _cb) |
| Register a custom noise callback. More... | |
Protected Attributes | |
| double | bias |
| If type starts with GAUSSIAN, the bias we'll add. More... | |
| double | mean |
| If type starts with GAUSSIAN, the mean of the distribution from which we sample when adding noise. More... | |
| double | precision |
| If type==GAUSSIAN_QUANTIZED, the precision to which the output signal is rounded. More... | |
| bool | quantized |
| True if the type is GAUSSIAN_QUANTIZED. More... | |
| double | stdDev |
| If type starts with GAUSSIAN, the standard deviation of the distribution from which we sample when adding noise. More... | |
Additional Inherited Members | |
| Public Types inherited from gazebo::sensors::Noise | |
| enum | NoiseType { NONE, CUSTOM, GAUSSIAN } |
| Which noise types we support. More... | |
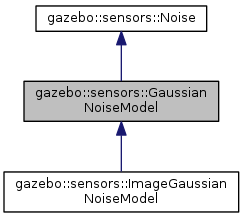
Gaussian noise class.
Gaussian noise class for image sensors.
| gazebo::sensors::GaussianNoiseModel::GaussianNoiseModel | ( | ) |
Constructor.
|
virtual |
Destructor.
|
virtual |
Apply noise to input data value.
This gets overriden by derived classes, and called by Apply.
| [in] | _in | Input data value. |
Reimplemented from gazebo::sensors::Noise.
|
virtual |
Finalize the noise model.
Reimplemented from gazebo::sensors::Noise.
Reimplemented in gazebo::sensors::ImageGaussianNoiseModel.
| double gazebo::sensors::GaussianNoiseModel::GetBias | ( | ) | const |
Accessor for bias.
| double gazebo::sensors::GaussianNoiseModel::GetMean | ( | ) | const |
Accessor for mean.
| double gazebo::sensors::GaussianNoiseModel::GetStdDev | ( | ) | const |
Accessor for stddev.
|
virtual |
Load noise parameters from sdf.
| [in] | _sdf | SDF parameters. |
| [in] | _sensor | Type of sensor. |
Reimplemented from gazebo::sensors::Noise.
Reimplemented in gazebo::sensors::ImageGaussianNoiseModel.
|
virtual |
Documentation inherited.
Reimplemented from gazebo::sensors::Noise.
Reimplemented in gazebo::sensors::ImageGaussianNoiseModel.
|
protected |
If type starts with GAUSSIAN, the bias we'll add.
|
protected |
If type starts with GAUSSIAN, the mean of the distribution from which we sample when adding noise.
|
protected |
If type==GAUSSIAN_QUANTIZED, the precision to which the output signal is rounded.
|
protected |
True if the type is GAUSSIAN_QUANTIZED.
|
protected |
If type starts with GAUSSIAN, the standard deviation of the distribution from which we sample when adding noise.