Skeleton animation.
More...
#include <SkeletonAnimation.hh>
|
| | SkeletonAnimation (const std::string &_name) |
| | The Constructor. More...
|
| |
| | ~SkeletonAnimation () |
| | The destructor. More...
|
| |
| void | AddKeyFrame (const std::string &_node, const double _time, const math::Matrix4 &_mat) |
| | Adds or replaces a named key frame at a specific time. More...
|
| |
| void | AddKeyFrame (const std::string &_node, const double _time, const math::Pose &_pose) |
| | Adds or replaces a named key frame at a specific time. More...
|
| |
| double | GetLength () const |
| | Returns the duration of the animations. More...
|
| |
| std::string | GetName () const |
| | Returns the name. More...
|
| |
| unsigned int | GetNodeCount () const |
| | Returns the number of animation nodes. More...
|
| |
| math::Matrix4 | GetNodePoseAt (const std::string &_node, const double _time, const bool _loop=true) |
| | Returns the key frame transformation for a named animation at a specific time if a node does not exist at that time (with tolerance of 1e-6 sec), the transformation is interpolated. More...
|
| |
std::map< std::string,
math::Matrix4 > | GetPoseAt (const double _time, const bool _loop=true) const |
| | Returns a dictionary of transformations indexed by name at a specific time if a node does not exist at that specific time (with tolerance of 1e-6 sec), the transformation is interpolated. More...
|
| |
std::map< std::string,
math::Matrix4 > | GetPoseAtX (const double _x, const std::string &_node, const bool _loop=true) const |
| | Returns a dictionary of transformations indexed by name where a named node transformation's translational value along the X axis is equal to _x. More...
|
| |
| bool | HasNode (const std::string &_node) const |
| | Looks for a node with a specific name in the animations. More...
|
| |
| void | Scale (const double _scale) |
| | Scales every animation in the animations list. More...
|
| |
| void | SetName (const std::string &_name) |
| | Changes the name. More...
|
| |
| gazebo::common::SkeletonAnimation::SkeletonAnimation |
( |
const std::string & |
_name | ) |
|
The Constructor.
- Parameters
-
| [in] | _name | the name of the animation |
| gazebo::common::SkeletonAnimation::~SkeletonAnimation |
( |
| ) |
|
The destructor.
Clears the list without destroying the animations
| void gazebo::common::SkeletonAnimation::AddKeyFrame |
( |
const std::string & |
_node, |
|
|
const double |
_time, |
|
|
const math::Matrix4 & |
_mat |
|
) |
| |
Adds or replaces a named key frame at a specific time.
- Parameters
-
| [in] | _node | the name of the new or existing node |
| [in] | _time | the time |
| [in] | _mat | the key frame transformation |
| void gazebo::common::SkeletonAnimation::AddKeyFrame |
( |
const std::string & |
_node, |
|
|
const double |
_time, |
|
|
const math::Pose & |
_pose |
|
) |
| |
Adds or replaces a named key frame at a specific time.
- Parameters
-
| [in] | _node | the name of the new or existing node |
| [in] | _time | the time |
| [in] | _pose | the key frame transformation as a math::Pose |
| double gazebo::common::SkeletonAnimation::GetLength |
( |
| ) |
const |
Returns the duration of the animations.
- Returns
- the duration in seconds
| std::string gazebo::common::SkeletonAnimation::GetName |
( |
| ) |
const |
Returns the name.
- Returns
- the name
| unsigned int gazebo::common::SkeletonAnimation::GetNodeCount |
( |
| ) |
const |
Returns the number of animation nodes.
- Returns
- the count
| math::Matrix4 gazebo::common::SkeletonAnimation::GetNodePoseAt |
( |
const std::string & |
_node, |
|
|
const double |
_time, |
|
|
const bool |
_loop = true |
|
) |
| |
Returns the key frame transformation for a named animation at a specific time if a node does not exist at that time (with tolerance of 1e-6 sec), the transformation is interpolated.
- Parameters
-
| [in] | _node | the name of the animation node |
| [in] | _time | the time |
| [in] | _loop | when true, the time is divided by the duration (see GetLength) |
- Returns
- the transformation
| std::map<std::string, math::Matrix4> gazebo::common::SkeletonAnimation::GetPoseAt |
( |
const double |
_time, |
|
|
const bool |
_loop = true |
|
) |
| const |
Returns a dictionary of transformations indexed by name at a specific time if a node does not exist at that specific time (with tolerance of 1e-6 sec), the transformation is interpolated.
- Parameters
-
| [in] | _time | the time |
| [in] | _loop | when true, the time is divided by the duration (see GetLength) |
- Returns
- the transformation for every node
| std::map<std::string, math::Matrix4> gazebo::common::SkeletonAnimation::GetPoseAtX |
( |
const double |
_x, |
|
|
const std::string & |
_node, |
|
|
const bool |
_loop = true |
|
) |
| const |
Returns a dictionary of transformations indexed by name where a named node transformation's translational value along the X axis is equal to _x.
- Parameters
-
| [in] | _x | the value along x. You must ensure that _x is within a valid range. |
| [in] | _node | the name of the animation node |
| [in] | _loop | when true, the time is divided by the duration (see GetLength) |
| bool gazebo::common::SkeletonAnimation::HasNode |
( |
const std::string & |
_node | ) |
const |
Looks for a node with a specific name in the animations.
- Parameters
-
| [in] | _node | the name of the node |
- Returns
- true if the node exits
| void gazebo::common::SkeletonAnimation::Scale |
( |
const double |
_scale | ) |
|
Scales every animation in the animations list.
- Parameters
-
| [in] | _scale | the scaling factor |
| void gazebo::common::SkeletonAnimation::SetName |
( |
const std::string & |
_name | ) |
|
Changes the name.
- Parameters
-
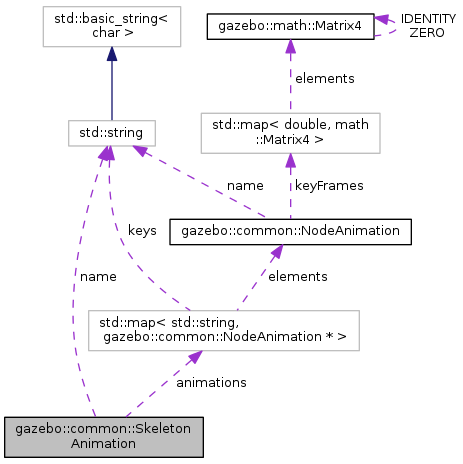
| std::map<std::string, NodeAnimation*> gazebo::common::SkeletonAnimation::animations |
|
protected |
a dictionary of node animations
| double gazebo::common::SkeletonAnimation::length |
|
protected |
the duration of the longest animation
| std::string gazebo::common::SkeletonAnimation::name |
|
protected |
The documentation for this class was generated from the following file: