#include <string>
#include <vector>
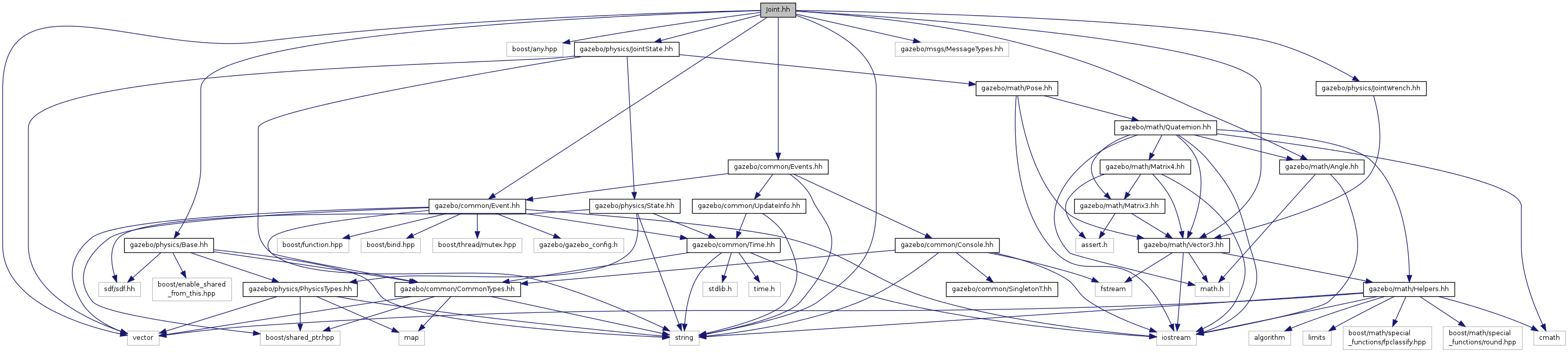
#include <boost/any.hpp>
#include "gazebo/common/Event.hh"
#include "gazebo/common/Events.hh"
#include "gazebo/math/Angle.hh"
#include "gazebo/math/Vector3.hh"
#include "gazebo/msgs/MessageTypes.hh"
#include "gazebo/physics/JointState.hh"
#include "gazebo/physics/Base.hh"
#include "gazebo/physics/JointWrench.hh"
Go to the source code of this file.
|
| namespace | gazebo |
| | Forward declarations for the common classes.
|
| |
| namespace | gazebo::physics |
| | namespace for physics
|
| |
maximum number of axis per joint anticipated.
Currently, this is 2 as 3-axis joints (e.g. ball) actuation, control is not there yet.