
#include <string>#include <map>#include <vector>#include <boost/thread/recursive_mutex.hpp>#include "gazebo/common/CommonTypes.hh"#include "gazebo/physics/PhysicsTypes.hh"#include "gazebo/physics/ModelState.hh"#include "gazebo/physics/Entity.hh"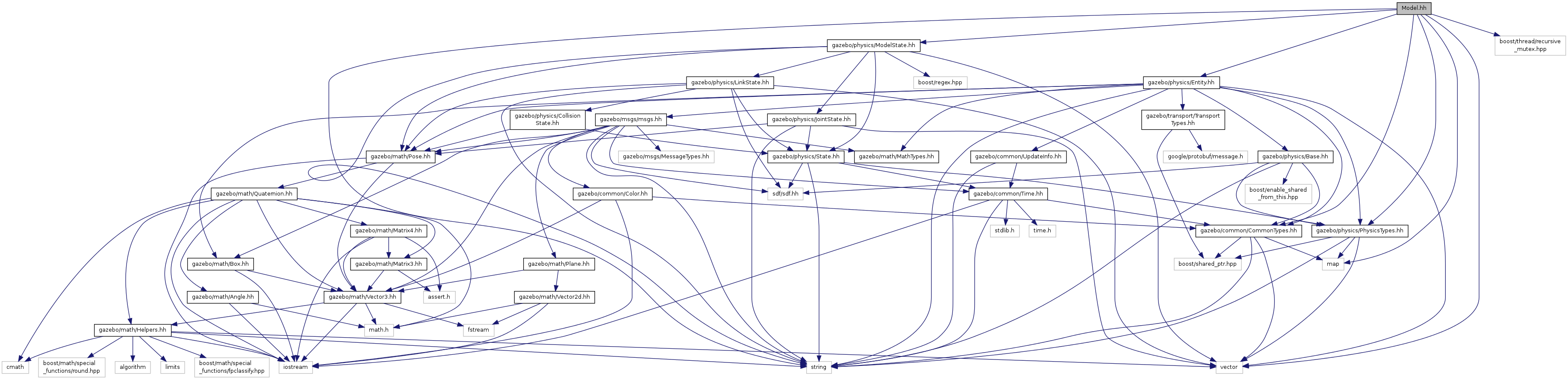
Go to the source code of this file.
Classes | |
| class | gazebo::physics::Model |
| A model is a collection of links, joints, and plugins. More... | |
Namespaces | |
| namespace | boost |
| namespace | gazebo |
| Forward declarations for the common classes. | |
| namespace | gazebo::physics |
| namespace for physics | |