|
| | DARTHingeJoint (BasePtr _parent) |
| | Constructor. More...
|
| |
| virtual | ~DARTHingeJoint () |
| | Destructor. More...
|
| |
| virtual math::Vector3 | GetAnchor (int _index) const |
| | Get the anchor point. More...
|
| |
| virtual math::Angle | GetAngleImpl (int _index) const |
| | Get the angle of an axis helper function. More...
|
| |
| virtual math::Vector3 | GetGlobalAxis (int _index) const |
| | Get the axis of rotation in global cooridnate frame. More...
|
| |
| virtual double | GetMaxForce (int _index) |
| | Get the max allowed force of an axis(index). More...
|
| |
| virtual double | GetVelocity (int _index) const |
| | Get the rotation rate of an axis(index) More...
|
| |
| virtual void | Init () |
| | Initialize joint. More...
|
| |
| virtual void | Load (sdf::ElementPtr _sdf) |
| | Load joint. More...
|
| |
| virtual void | SetAxis (int _index, const math::Vector3 &_axis) |
| | Set the axis of rotation where axis is specified in local joint frame. More...
|
| |
| virtual void | SetMaxForce (int _index, double _force) |
| | Set the max allowed force of an axis(index). More...
|
| |
| virtual void | SetVelocity (int _index, double _vel) |
| | Set the velocity of an axis(index). More...
|
| |
| | HingeJoint (BasePtr _parent) |
| | Constructor. More...
|
| |
| virtual | ~HingeJoint () |
| | Destructor. More...
|
| |
| virtual unsigned int | GetAngleCount () const |
| | Get the angle count. More...
|
| |
| | DARTJoint (BasePtr _parent) |
| | Constructor. More...
|
| |
| virtual | ~DARTJoint () |
| | Destructor. More...
|
| |
| virtual void | ApplyDamping () |
| | Callback to apply damping force to joint. More...
|
| |
| virtual bool | AreConnected (LinkPtr _one, LinkPtr _two) const |
| | Determines of the two bodies are connected by a joint. More...
|
| |
| virtual void | Attach (LinkPtr _parent, LinkPtr _child) |
| | Attach the two bodies with this joint. More...
|
| |
| virtual void | Detach () |
| | Detach this joint from all links. More...
|
| |
| virtual double | GetAttribute (const std::string &_key, unsigned int _index) |
| | Get a non-generic parameter for the joint. More...
|
| |
| dart::dynamics::Joint * | GetDARTJoint () |
| | Get DART joint pointer. More...
|
| |
| DARTModelPtr | GetDARTModel () const |
| | Get DART model pointer. More...
|
| |
| virtual double | GetForce (unsigned int _index) |
| |
| virtual JointWrench | GetForceTorque (int _index) |
| |
| virtual JointWrench | GetForceTorque (unsigned int _index) |
| | get internal force and torque values at a joint. More...
|
| |
| virtual math::Angle | GetHighStop (int _index) |
| | Get the high stop of an axis(index). More...
|
| |
| virtual LinkPtr | GetJointLink (int _index) const |
| | Get the link to which the joint is attached according the _index. More...
|
| |
| virtual math::Vector3 | GetLinkForce (unsigned int _index) const |
| | Get the forces applied to the center of mass of a physics::Link due to the existence of this Joint. More...
|
| |
| virtual math::Vector3 | GetLinkTorque (unsigned int _index) const |
| | Get the torque applied to the center of mass of a physics::Link due to the existence of this Joint. More...
|
| |
| virtual math::Angle | GetLowStop (int _index) |
| | Get the low stop of an axis(index). More...
|
| |
| virtual void | Reset () |
| | Reset the joint. More...
|
| |
| virtual void | SetAnchor (int, const gazebo::math::Vector3 &) |
| | Set the anchor point. More...
|
| |
| virtual void | SetAttribute (const std::string &_key, int _index, const boost::any &_value) |
| | Set a non-generic parameter for the joint. More...
|
| |
| virtual void | SetDamping (int _index, double _damping) |
| | Set the joint damping. More...
|
| |
| virtual void | SetForce (int _index, double _force) |
| | Set the force applied to this physics::Joint. More...
|
| |
| virtual void | SetHighStop (int _index, const math::Angle &_angle) |
| | Set the high stop of an axis(index). More...
|
| |
| virtual void | SetLowStop (int _index, const math::Angle &_angle) |
| | Set the low stop of an axis(index). More...
|
| |
| | Joint (BasePtr _parent) |
| | Constructor. More...
|
| |
| virtual | ~Joint () |
| | Destructor. More...
|
| |
| virtual void | CacheForceTorque () |
| | Cache Joint Force Torque Values if necessary for physics engine. More...
|
| |
| double | CheckAndTruncateForce (int _index, double _effort) |
| | check if the force against velocityLimit and effortLimit, truncate if necessary. More...
|
| |
| template<typename T > |
| event::ConnectionPtr | ConnectJointUpdate (T _subscriber) |
| | Connect a boost::slot the the joint update signal. More...
|
| |
| void | DisconnectJointUpdate (event::ConnectionPtr &_conn) |
| | Disconnect a boost::slot the the joint update signal. More...
|
| |
| void | FillMsg (msgs::Joint &_msg) |
| | Fill a joint message. More...
|
| |
| math::Angle | GetAngle (int _index) const |
| | Get the angle of rotation of an axis(index) More...
|
| |
| LinkPtr | GetChild () const |
| | Get the child link. More...
|
| |
| double | GetDamping (int _index) |
| | Returns the current joint damping coefficient. More...
|
| |
| double | GetDampingCoefficient () const |
| | Get damping coefficient of this joint. More...
|
| |
| virtual double | GetEffortLimit (int _index) |
| | Get the effort limit on axis(index). More...
|
| |
| double | GetInertiaRatio (unsigned int _index) const |
| | Accessor to inertia ratio across this joint. More...
|
| |
| math::Pose | GetInitialAnchorPose () |
| | Get initial Anchor Pose specified by model <joint><pose>...</pose></joint> More...
|
| |
| math::Vector3 | GetLocalAxis (int _index) const |
| | Get the axis of rotation. More...
|
| |
| math::Angle | GetLowerLimit (unsigned int _index) const |
| | : get the joint upper limit (replaces GetLowStop and GetHighStop) More...
|
| |
| LinkPtr | GetParent () const |
| | Get the parent link. More...
|
| |
| math::Angle | GetUpperLimit (unsigned int _index) const |
| | : get the joint lower limit (replacee GetLowStop and GetHighStop) More...
|
| |
| virtual double | GetVelocityLimit (int _index) |
| | Get the velocity limit on axis(index). More...
|
| |
| void | Load (LinkPtr _parent, LinkPtr _child, const math::Pose &_pose) |
| | Set pose, parent and child links of a physics::Joint. More...
|
| |
| void | SetAngle (int _index, math::Angle _angle) |
| | If the Joint is static, Gazebo stores the state of this Joint as a scalar inside the Joint class, so this call will NOT move the joint dynamically for a static Model. More...
|
| |
| virtual void | SetEffortLimit (unsigned int _index, double _effort) |
| | Set the effort limit on a joint axis. More...
|
| |
| void | SetModel (ModelPtr _model) |
| | Set the model this joint belongs too. More...
|
| |
| virtual void | SetProvideFeedback (bool _enable) |
| | Set whether the joint should generate feedback. More...
|
| |
| void | SetState (const JointState &_state) |
| | Set the joint state. More...
|
| |
| void | Update () |
| | Update the joint. More...
|
| |
| virtual void | UpdateParameters (sdf::ElementPtr _sdf) |
| | Update the parameters using new sdf values. More...
|
| |
| | Base (BasePtr _parent) |
| | Constructor. More...
|
| |
| virtual | ~Base () |
| | Destructor. More...
|
| |
| void | AddChild (BasePtr _child) |
| | Add a child to this entity. More...
|
| |
| void | AddType (EntityType _type) |
| | Add a type specifier. More...
|
| |
| virtual void | Fini () |
| | Finialize the object. More...
|
| |
| BasePtr | GetByName (const std::string &_name) |
| | Get by name. More...
|
| |
| BasePtr | GetChild (unsigned int _i) const |
| | Get a child by index. More...
|
| |
| BasePtr | GetChild (const std::string &_name) |
| | Get a child by name. More...
|
| |
| unsigned int | GetChildCount () const |
| | Get the number of children. More...
|
| |
| uint32_t | GetId () const |
| | Return the ID of this entity. More...
|
| |
| std::string | GetName () const |
| | Return the name of the entity. More...
|
| |
| BasePtr | GetParent () const |
| | Get the parent. More...
|
| |
| int | GetParentId () const |
| | Return the ID of the parent. More...
|
| |
| bool | GetSaveable () const |
| | Get whether the object should be "saved", when the user selects to save the world to xml. More...
|
| |
| std::string | GetScopedName () const |
| | Return the name of this entity with the model scope world::model1::...::modelN::entityName. More...
|
| |
| virtual const sdf::ElementPtr | GetSDF () |
| | Get the SDF values for the object. More...
|
| |
| unsigned int | GetType () const |
| | Get the full type definition. More...
|
| |
| const WorldPtr & | GetWorld () const |
| | Get the World this object is in. More...
|
| |
| bool | HasType (const EntityType &_t) const |
| | Returns true if this object's type definition has the given type. More...
|
| |
| bool | IsSelected () const |
| | True if the entity is selected by the user. More...
|
| |
| bool | operator== (const Base &_ent) const |
| | Returns true if the entities are the same. More...
|
| |
| void | Print (const std::string &_prefix) |
| | Print this object to screen via gzmsg. More...
|
| |
| virtual void | RemoveChild (unsigned int _id) |
| | Remove a child from this entity. More...
|
| |
| void | RemoveChild (const std::string &_name) |
| | Remove a child by name. More...
|
| |
| void | RemoveChildren () |
| | Remove all children. More...
|
| |
| virtual void | Reset (Base::EntityType _resetType) |
| | Calls recursive Reset on one of the Base::EntityType's. More...
|
| |
| virtual void | SetName (const std::string &_name) |
| | Set the name of the entity. More...
|
| |
| void | SetParent (BasePtr _parent) |
| | Set the parent. More...
|
| |
| void | SetSaveable (bool _v) |
| | Set whether the object should be "saved", when the user selects to save the world to xml. More...
|
| |
| virtual bool | SetSelected (bool _show) |
| | Set whether this entity has been selected by the user through the gui. More...
|
| |
| void | SetWorld (const WorldPtr &_newWorld) |
| | Set the world this object belongs to. More...
|
| |
A single axis hinge joint.

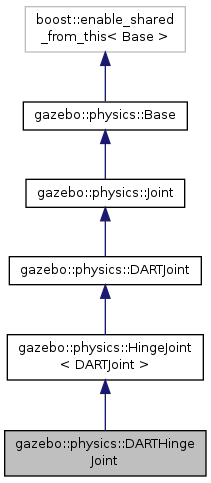
 Public Member Functions inherited from gazebo::physics::HingeJoint< DARTJoint >
Public Member Functions inherited from gazebo::physics::HingeJoint< DARTJoint >