
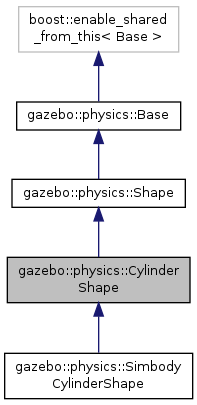
Cylinder collision. More...
#include <physics/physics.hh>
Public Member Functions | |
| CylinderShape (CollisionPtr _parent) | |
| Constructor. More... | |
| virtual | ~CylinderShape () |
| Destructor. More... | |
| void | FillMsg (msgs::Geometry &_msg) |
| Fill in the values for a geomertry message. More... | |
| double | GetLength () const |
| Get length. More... | |
| double | GetRadius () const |
| Get radius. More... | |
| void | Init () |
| Initialize the cylinder. More... | |
| virtual void | ProcessMsg (const msgs::Geometry &_msg) |
| Update values based on a message. More... | |
| void | SetLength (double _length) |
| Set length. More... | |
| void | SetRadius (double _radius) |
| Set radius. More... | |
| virtual void | SetScale (const math::Vector3 &_scale) |
| Set scale of cylinder. More... | |
| virtual void | SetSize (double _radius, double _length) |
| Set the size of the cylinder. More... | |
 Public Member Functions inherited from gazebo::physics::Shape Public Member Functions inherited from gazebo::physics::Shape | |
| Shape (CollisionPtr _parent) | |
| Constructor. More... | |
| virtual | ~Shape () |
| Destructor. More... | |
| virtual math::Vector3 | GetScale () const |
| Get the scale of the shape. More... | |
| Public Member Functions inherited from gazebo::physics::Base | |
| Base (BasePtr _parent) | |
| Constructor. More... | |
| virtual | ~Base () |
| Destructor. More... | |
| void | AddChild (BasePtr _child) |
| Add a child to this entity. More... | |
| void | AddType (EntityType _type) |
| Add a type specifier. More... | |
| virtual void | Fini () |
| Finialize the object. More... | |
| BasePtr | GetByName (const std::string &_name) |
| Get by name. More... | |
| BasePtr | GetChild (unsigned int _i) const |
| Get a child by index. More... | |
| BasePtr | GetChild (const std::string &_name) |
| Get a child by name. More... | |
| unsigned int | GetChildCount () const |
| Get the number of children. More... | |
| uint32_t | GetId () const |
| Return the ID of this entity. More... | |
| std::string | GetName () const |
| Return the name of the entity. More... | |
| BasePtr | GetParent () const |
| Get the parent. More... | |
| int | GetParentId () const |
| Return the ID of the parent. More... | |
| bool | GetSaveable () const |
| Get whether the object should be "saved", when the user selects to save the world to xml. More... | |
| std::string | GetScopedName () const |
| Return the name of this entity with the model scope world::model1::...::modelN::entityName. More... | |
| virtual const sdf::ElementPtr | GetSDF () |
| Get the SDF values for the object. More... | |
| unsigned int | GetType () const |
| Get the full type definition. More... | |
| const WorldPtr & | GetWorld () const |
| Get the World this object is in. More... | |
| bool | HasType (const EntityType &_t) const |
| Returns true if this object's type definition has the given type. More... | |
| bool | IsSelected () const |
| True if the entity is selected by the user. More... | |
| virtual void | Load (sdf::ElementPtr _sdf) |
| Load. More... | |
| bool | operator== (const Base &_ent) const |
| Returns true if the entities are the same. More... | |
| void | Print (const std::string &_prefix) |
| Print this object to screen via gzmsg. More... | |
| virtual void | RemoveChild (unsigned int _id) |
| Remove a child from this entity. More... | |
| void | RemoveChild (const std::string &_name) |
| Remove a child by name. More... | |
| void | RemoveChildren () |
| Remove all children. More... | |
| virtual void | Reset () |
| Reset the object. More... | |
| virtual void | Reset (Base::EntityType _resetType) |
| Calls recursive Reset on one of the Base::EntityType's. More... | |
| virtual void | SetName (const std::string &_name) |
| Set the name of the entity. More... | |
| void | SetParent (BasePtr _parent) |
| Set the parent. More... | |
| void | SetSaveable (bool _v) |
| Set whether the object should be "saved", when the user selects to save the world to xml. More... | |
| virtual bool | SetSelected (bool _show) |
| Set whether this entity has been selected by the user through the gui. More... | |
| void | SetWorld (const WorldPtr &_newWorld) |
| Set the world this object belongs to. More... | |
| virtual void | Update () |
| Update the object. More... | |
| virtual void | UpdateParameters (sdf::ElementPtr _sdf) |
| Update the parameters using new sdf values. More... | |
Additional Inherited Members | |
| Public Types inherited from gazebo::physics::Base | |
| enum | EntityType { BASE = 0x00000000, ENTITY = 0x00000001, MODEL = 0x00000002, LINK = 0x00000004, COLLISION = 0x00000008, ACTOR = 0x00000016, LIGHT = 0x00000010, VISUAL = 0x00000020, JOINT = 0x00000040, BALL_JOINT = 0x00000080, HINGE2_JOINT = 0x00000100, HINGE_JOINT = 0x00000200, SLIDER_JOINT = 0x00000400, SCREW_JOINT = 0x00000800, UNIVERSAL_JOINT = 0x00001000, SHAPE = 0x00002000, BOX_SHAPE = 0x00004000, CYLINDER_SHAPE = 0x00008000, HEIGHTMAP_SHAPE = 0x00010000, MAP_SHAPE = 0x00020000, MULTIRAY_SHAPE = 0x00040000, RAY_SHAPE = 0x00080000, PLANE_SHAPE = 0x00100000, SPHERE_SHAPE = 0x00200000, MESH_SHAPE = 0x00400000, SENSOR_COLLISION = 0x00800000 } |
| Unique identifiers for all entity types. More... | |
| Protected Member Functions inherited from gazebo::physics::Base | |
| void | ComputeScopedName () |
| Compute the scoped name of this object based on its parents. More... | |
| Protected Attributes inherited from gazebo::physics::Shape | |
| CollisionPtr | collisionParent |
| This shape's collision parent. More... | |
| math::Vector3 | scale |
| This shape's scale;. More... | |
Cylinder collision.
|
explicit |
Constructor.
| [in] | _parent | Parent of the shape. |
|
virtual |
Destructor.
|
virtual |
Fill in the values for a geomertry message.
| [out] | _msg | The geometry message to fill. |
Implements gazebo::physics::Shape.
| double gazebo::physics::CylinderShape::GetLength | ( | ) | const |
Get length.
| double gazebo::physics::CylinderShape::GetRadius | ( | ) | const |
Get radius.
|
virtual |
Initialize the cylinder.
Implements gazebo::physics::Shape.
|
virtual |
Update values based on a message.
| [in] | _msg | Message to update from. |
Implements gazebo::physics::Shape.
| void gazebo::physics::CylinderShape::SetLength | ( | double | _length | ) |
Set length.
| [in] | _length | New length of the cylinder. |
| void gazebo::physics::CylinderShape::SetRadius | ( | double | _radius | ) |
Set radius.
| in} | _radius New radius of the cylinder. |
|
virtual |
Set scale of cylinder.
| [in] | _scale | Scale to set the cylinder to. |
Implements gazebo::physics::Shape.
|
virtual |
Set the size of the cylinder.
| [in] | _radius | New radius. |
| [in] | _lenght | New length. |
Reimplemented in gazebo::physics::SimbodyCylinderShape.
Referenced by gazebo::physics::SimbodyCylinderShape::SetSize().