
Base class for sensors. More...
#include <sensors/sensors.hh>
Public Member Functions | |
| Sensor (SensorCategory _cat) | |
| Constructor. More... | |
| virtual | ~Sensor () |
| Destructor. More... | |
| template<typename T > | |
| event::ConnectionPtr | ConnectUpdated (T _subscriber) |
| Connect a signal that is triggered when the sensor is updated. More... | |
| void | DisconnectUpdated (event::ConnectionPtr &_c) |
| Disconnect from a the updated signal. More... | |
| void | FillMsg (msgs::Sensor &_msg) |
| fills a msgs::Sensor message. More... | |
| virtual void | Fini () |
| Finalize the sensor. More... | |
| SensorCategory | GetCategory () const |
| Get the category of the sensor. More... | |
| uint32_t | GetId () const |
| Get the sensor's ID. More... | |
| common::Time | GetLastMeasurementTime () |
| Return last measurement time. More... | |
| common::Time | GetLastUpdateTime () |
| Return last update time. More... | |
| std::string | GetName () const |
| Get name. More... | |
| uint32_t | GetParentId () const |
| Get the sensor's parent's ID. More... | |
| std::string | GetParentName () const |
| Returns the name of the sensor parent. More... | |
| virtual math::Pose | GetPose () const |
| Get the current pose. More... | |
| std::string | GetScopedName () const |
| Get fully scoped name of the sensor. More... | |
| virtual std::string | GetTopic () const |
| Returns the topic name as set in SDF. More... | |
| std::string | GetType () const |
| Get sensor type. More... | |
| double | GetUpdateRate () |
| Get the update rate of the sensor. More... | |
| bool | GetVisualize () const |
| Return true if user requests the sensor to be visualized via tag: <visualize>true</visualize> in SDF. More... | |
| std::string | GetWorldName () const |
| Returns the name of the world the sensor is in. More... | |
| virtual void | Init () |
| Initialize the sensor. More... | |
| virtual bool | IsActive () |
| Returns true if sensor generation is active. More... | |
| virtual void | Load (const std::string &_worldName, sdf::ElementPtr _sdf) |
| Load the sensor with SDF parameters. More... | |
| virtual void | Load (const std::string &_worldName) |
| Load the sensor with default parameters. More... | |
| void | ResetLastUpdateTime () |
| Reset the lastUpdateTime to zero. More... | |
| virtual void | SetActive (bool _value) |
| Set whether the sensor is active or not. More... | |
| virtual void | SetParent (const std::string &_name) GAZEBO_DEPRECATED(2.0) |
| Set the parent of the sensor. More... | |
| void | SetParent (const std::string &_name, uint32_t _id) |
| Set the sensor's parent. More... | |
| void | SetUpdateRate (double _hz) |
| Set the update rate of the sensor. More... | |
| void | Update (bool _force) |
| Update the sensor. More... | |
Protected Member Functions | |
| virtual void | UpdateImpl (bool) |
| This gets overwritten by derived sensor types. More... | |
Protected Attributes | |
| bool | active |
| True if sensor generation is active. More... | |
| std::vector< event::ConnectionPtr > | connections |
| All event connections. More... | |
| common::Time | lastMeasurementTime |
| Stores last time that a sensor measurement was generated; this value must be updated within each sensor's UpdateImpl. More... | |
| common::Time | lastUpdateTime |
| Time of the last update. More... | |
| boost::mutex | mutexLastUpdateTime |
| Mutex to protect resetting lastUpdateTime. More... | |
| transport::NodePtr | node |
| Node for communication. More... | |
| uint32_t | parentId |
| The sensor's parent ID. More... | |
| std::string | parentName |
| Name of the parent. More... | |
| std::vector< SensorPluginPtr > | plugins |
| All the plugins for the sensor. More... | |
| math::Pose | pose |
| Pose of the sensor. More... | |
| transport::SubscriberPtr | poseSub |
| Subscribe to pose updates. More... | |
| gazebo::rendering::ScenePtr | scene |
| Pointer to the Scene. More... | |
| sdf::ElementPtr | sdf |
| Pointer the the SDF element for the sensor. More... | |
| common::Time | updatePeriod |
| Desired time between updates, set indirectly by Sensor::SetUpdateRate. More... | |
| gazebo::physics::WorldPtr | world |
| Pointer to the world. More... | |
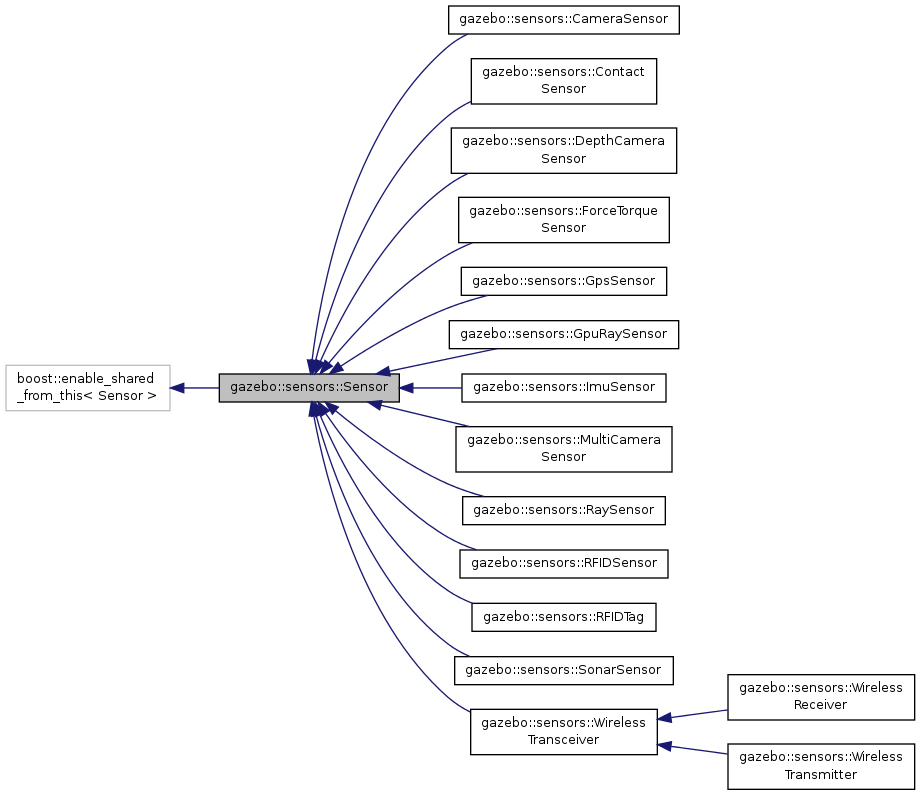
Base class for sensors.
|
explicit |
Constructor.
| [in] | _class |
|
virtual |
Destructor.
|
inline |
Connect a signal that is triggered when the sensor is updated.
| [in] | _subscriber | Callback that receives the signal. |
References gazebo::event::EventT< T >::Connect().
|
inline |
Disconnect from a the updated signal.
| [in] | _c | The connection to disconnect |
References gazebo::event::EventT< T >::Disconnect().
| void gazebo::sensors::Sensor::FillMsg | ( | msgs::Sensor & | _msg | ) |
fills a msgs::Sensor message.
| [out] | _msg | Message to fill. |
|
virtual |
Finalize the sensor.
Reimplemented in gazebo::sensors::MultiCameraSensor, gazebo::sensors::ForceTorqueSensor, gazebo::sensors::GpuRaySensor, gazebo::sensors::CameraSensor, gazebo::sensors::ContactSensor, gazebo::sensors::RFIDSensor, gazebo::sensors::RaySensor, gazebo::sensors::DepthCameraSensor, gazebo::sensors::RFIDTag, gazebo::sensors::GpsSensor, gazebo::sensors::SonarSensor, gazebo::sensors::ImuSensor, gazebo::sensors::WirelessTransceiver, and gazebo::sensors::WirelessReceiver.
| SensorCategory gazebo::sensors::Sensor::GetCategory | ( | ) | const |
| uint32_t gazebo::sensors::Sensor::GetId | ( | ) | const |
Get the sensor's ID.
| common::Time gazebo::sensors::Sensor::GetLastMeasurementTime | ( | ) |
Return last measurement time.
| common::Time gazebo::sensors::Sensor::GetLastUpdateTime | ( | ) |
Return last update time.
| std::string gazebo::sensors::Sensor::GetName | ( | ) | const |
Get name.
| uint32_t gazebo::sensors::Sensor::GetParentId | ( | ) | const |
Get the sensor's parent's ID.
| std::string gazebo::sensors::Sensor::GetParentName | ( | ) | const |
Returns the name of the sensor parent.
The parent name is set by Sensor::SetParent.
|
virtual |
Get the current pose.
| std::string gazebo::sensors::Sensor::GetScopedName | ( | ) | const |
Get fully scoped name of the sensor.
|
virtual |
Returns the topic name as set in SDF.
Reimplemented in gazebo::sensors::GpuRaySensor, gazebo::sensors::RaySensor, gazebo::sensors::CameraSensor, gazebo::sensors::SonarSensor, gazebo::sensors::MultiCameraSensor, gazebo::sensors::ForceTorqueSensor, and gazebo::sensors::WirelessTransceiver.
| std::string gazebo::sensors::Sensor::GetType | ( | ) | const |
Get sensor type.
| double gazebo::sensors::Sensor::GetUpdateRate | ( | ) |
Get the update rate of the sensor.
| bool gazebo::sensors::Sensor::GetVisualize | ( | ) | const |
Return true if user requests the sensor to be visualized via tag: <visualize>true</visualize> in SDF.
| std::string gazebo::sensors::Sensor::GetWorldName | ( | ) | const |
Returns the name of the world the sensor is in.
|
virtual |
Initialize the sensor.
Reimplemented in gazebo::sensors::GpuRaySensor, gazebo::sensors::ContactSensor, gazebo::sensors::RFIDSensor, gazebo::sensors::RaySensor, gazebo::sensors::CameraSensor, gazebo::sensors::DepthCameraSensor, gazebo::sensors::WirelessTransmitter, gazebo::sensors::RFIDTag, gazebo::sensors::GpsSensor, gazebo::sensors::SonarSensor, gazebo::sensors::MultiCameraSensor, gazebo::sensors::ImuSensor, gazebo::sensors::WirelessTransceiver, gazebo::sensors::ForceTorqueSensor, and gazebo::sensors::WirelessReceiver.
|
virtual |
Returns true if sensor generation is active.
Reimplemented in gazebo::sensors::GpuRaySensor, gazebo::sensors::RaySensor, gazebo::sensors::ContactSensor, gazebo::sensors::CameraSensor, gazebo::sensors::MultiCameraSensor, gazebo::sensors::SonarSensor, gazebo::sensors::ImuSensor, and gazebo::sensors::ForceTorqueSensor.
|
virtual |
Load the sensor with SDF parameters.
| [in] | _sdf | SDF Sensor parameters. |
| [in] | _worldName | Name of world to load from. |
Reimplemented in gazebo::sensors::ContactSensor, gazebo::sensors::RFIDSensor, gazebo::sensors::CameraSensor, and gazebo::sensors::ImuSensor.
|
virtual |
Load the sensor with default parameters.
| [in] | _worldName | Name of world to load from. |
Reimplemented in gazebo::sensors::GpuRaySensor, gazebo::sensors::ContactSensor, gazebo::sensors::RFIDSensor, gazebo::sensors::RaySensor, gazebo::sensors::CameraSensor, gazebo::sensors::DepthCameraSensor, gazebo::sensors::WirelessTransmitter, gazebo::sensors::RFIDTag, gazebo::sensors::GpsSensor, gazebo::sensors::SonarSensor, gazebo::sensors::MultiCameraSensor, gazebo::sensors::ImuSensor, gazebo::sensors::WirelessTransceiver, gazebo::sensors::ForceTorqueSensor, and gazebo::sensors::WirelessReceiver.
| void gazebo::sensors::Sensor::ResetLastUpdateTime | ( | ) |
Reset the lastUpdateTime to zero.
|
virtual |
Set whether the sensor is active or not.
| [in] | _value | True if active, false if not. |
Reimplemented in gazebo::sensors::DepthCameraSensor.
|
virtual |
Set the parent of the sensor.
| [in] | _name | Name of the parent. |
| void gazebo::sensors::Sensor::SetParent | ( | const std::string & | _name, |
| uint32_t | _id | ||
| ) |
Set the sensor's parent.
| [in] | _name | The sensor's parent's name. |
| [in] | _id | The sensor's parent's ID. |
| void gazebo::sensors::Sensor::SetUpdateRate | ( | double | _hz | ) |
Set the update rate of the sensor.
| [in] | _hz | update rate of sensor. |
| void gazebo::sensors::Sensor::Update | ( | bool | _force | ) |
Update the sensor.
| [in] | _force | True to force update, false otherwise. |
|
inlineprotectedvirtual |
This gets overwritten by derived sensor types.
This function is called during Sensor::Update. And in turn, Sensor::Update is called by SensorManager::Update
| [in] | _force | True if update is forced, false if not |
Reimplemented in gazebo::sensors::MultiCameraSensor, gazebo::sensors::ForceTorqueSensor, gazebo::sensors::GpuRaySensor, gazebo::sensors::CameraSensor, gazebo::sensors::ContactSensor, gazebo::sensors::RFIDSensor, gazebo::sensors::RaySensor, gazebo::sensors::DepthCameraSensor, gazebo::sensors::RFIDTag, gazebo::sensors::GpsSensor, gazebo::sensors::SonarSensor, gazebo::sensors::WirelessTransmitter, and gazebo::sensors::ImuSensor.
|
protected |
True if sensor generation is active.
|
protected |
All event connections.
|
protected |
Stores last time that a sensor measurement was generated; this value must be updated within each sensor's UpdateImpl.
|
protected |
Time of the last update.
|
protected |
Mutex to protect resetting lastUpdateTime.
|
protected |
Node for communication.
|
protected |
The sensor's parent ID.
|
protected |
Name of the parent.
|
protected |
All the plugins for the sensor.
|
protected |
Pose of the sensor.
|
protected |
Subscribe to pose updates.
|
protected |
Pointer to the Scene.
|
protected |
Pointer the the SDF element for the sensor.
|
protected |
Desired time between updates, set indirectly by Sensor::SetUpdateRate.
|
protected |
Pointer to the world.